|
Flexiv RDK APIs
1.6.0
|
|
Flexiv RDK APIs
1.6.0
|
#include "robot.hpp"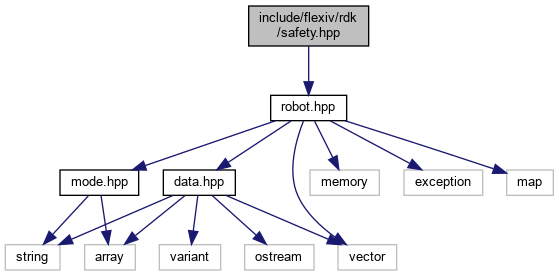
Go to the source code of this file.
Classes | |
| struct | flexiv::rdk::SafetyLimits |
| Data structure containing configurable robot safety limits. More... | |
| class | flexiv::rdk::Safety |
| Interface to change robot safety settings. The robot must be in IDLE mode when applying any changes. A password is required to authenticate this interface. More... | |
Variables | |
| constexpr size_t | flexiv::rdk::kSafetyIOPorts = 8 |
Definition in file safety.hpp.
|
constexpr |
Number of safety IO ports
Definition at line 15 of file safety.hpp.